 Fraunhofer Institute for Photonic Microsystems
Fraunhofer Institute for Photonic MicrosystemsHigher Resolution for Laser Scanning and Laser Projection
The newly developed LinScan scanner technology from Fraunhofer IPMS opens up new possibilities for laser scanners and laser projectors. This new driving scheme allows switching of the target positions of the laser beam quickly, and a dynamic adjustment of the scanning speed is also possible. 3D cameras or miniaturized laser projectors equipped with this technology offer higher resolution and make innovative solutions possible, such as robot eyes with sharp vision or compact cell phone projectors with high image quality. The Fraunhofer Institute for Photonic Microsystems IPMS will be presenting this technology to industry professionals at Vision 2012 from November 6 - 8.
Service robots will be able to replace humans in the future – at least when it comes to jobs that endanger health and safety, are too awkward or complicated, or can simply be done more economically or conveniently than by humans. However, in order for the robots to be able to perform such complex tasks independently and reliably, the robots need to not only see, but also be able to interpret their environment on their own and be able to control their vision according to ambient conditions. This depends upon the premise that their environmental visualization functions similarly to the way the human eye works, i.e. that the sharpest area of vision, on the retina of the human eye, the so-called fovea, is concentrated upon objects within our surroundings that we perceive as interesting or important. »That is exactly what a camera with LinScan technology is capable of«, says Thilo Sandner, Project Manager at Fraunhofer IPMS, and explains: »The camera potentially imitates the human visualization system by first scanning the surroundings and then resolving interesting objects with greater precision.«
The LinScan technology poses a tremendous developmental leap for application in compact laser projectors as well. Unlike the double-resonant scanning principle used so far for pico-projectors, where the mirror oscillates in a sinusoidal manner with a frequency predefined by the geometry of the component, LinScan makes it possible for the laser beam to jump from line to line with a flexible scanning speed. Image resolutions of SVGA (800 x 600) and more become possible with miniaturized architectures.
LinScan: Quasi-Static Scanner Technology
LinScan is based on the manufacturing technology developed by Fraunhofer IPMS for resonant microscanners. The idea is to tilt the drive combs of the hitherto existing resonant scanner toward each other. This makes the linear drive of the mirror plate on one axis possible. Furthermore, a resonant drive with a defined frequency on the fast horizontal axis can be combined with a variable quasi-static oscillation on the vertical axis. The components are manufactured in the Fraunhofer IPMS cleanroom in a bulk micromachining manufacturing process. All of the micro-mechanical components are manufactured as two-dimensional structures in a layer of monocrystalline silicon. The vertical comb electrodes are realized in an adhesive wafer bonding process with a second planar-structured silicon wafer. Mechanical solid state structures on the second wafer tilt or stagger the in-plane comb drive, the whole device is fixed by and subsequent wafer-bonding fusing. Given the small tolerances of micromachining processes, the structures on the two wafers are optimal aligned to each other. This component concept is extremely flexible and makes it possible to realize a broad spectrum of component characteristics.
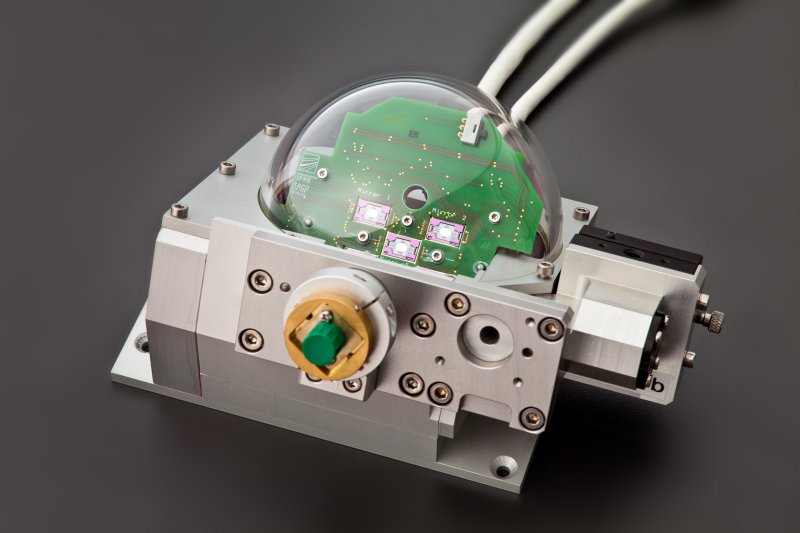
Initial Implementation in an Adaptive 3D Camera
At the Vision 2012 trade show, from November 6 - 8, Fraunhofer IPMS will be presenting double resonant scanning technology in addition to LinScan to interested industry professionals. The double resonant scanning principle will be demonstrated using the examples of both an endomicroscope as well as a confocal 3D fluorescent microscope. One initial prototype of an optical scanning head with five integrated, synchronically operated LinScan scanning mirrors, as well as a linear projector, will illustrate the current technical possibilities of the LinScan component concept. The scanning head is the intermediate result of the European joint research project »TACO«, carried out by Fraunhofer IPMS in cooperation with four other research facilities and two enterprises. Together, the partners are working on implementing the foveal principle – i.e. the rough scanning of objects appearing within the range of sight – in a 3D camera system to detect the objects looked for, and record said objects with a markedly higher resolution. The researchers plan to combine the LinScan scanning technology with a three-dimensional object survey based upon time of flight (TOF) as well as with software for ultra-fast object capture and to increase comprehension of the surroundings.
Visitors to Vision 2012 will find the Fraunhofer IPMS exhibit on stand A22 in hall 1 (Stand A22, Halle 1).
About Fraunhofer IPMS
The Fraunhofer Institute for Photonic Microsystems IPMS and its 200 employees turn over an annual research volume of 20 million euros. Fraunhofer IPMS generates more than two thirds of this production capacity out of commissions from industry and publicly financed projects in applied research. The focus of our development and production services lies in the practical industrial application of unique technological know-how in the fields of (optical) micro-electromechanical systems [MEMS, MOEMS]. Fraunhofer IMPS uses scientific know-how, application experience and customer contacts as well as modern equipment and clean room infrastructure. Fraunhofer IPMS covers a broad spectrum of industrial applications. Our services range from initial conception to product development, right down to serial pilot production – from a single component to a complete system solution.
About TACO
TACO (Three dimensional Adaptive Camera with Object detection and foveation) is a research project co-financed by the European Union within the scope of the 7th Framework Program. The project was started in the first quarter of 2012 under the direction of Technikon Forschungsgesellschaft mbH with a time frame of 36 months.
The partners in the TACO project are: Technikon Forschungs- und Planungsgesellschaft mbH (AT), Shadow Robot Company Limited (UK), Oxford Technologies LTD (UK), TU Vienna (A), Fraunhofer Germany (DE), Stiftelsen SINTEF (N), and CTR Carinthian Tech Research AG (AT).