 Fraunhofer-Institut für Photonische Mikrosysteme
Fraunhofer-Institut für Photonische MikrosystemeNeue Augen für Roboter – Fraunhofer IPMS präsentiert Kamerasystem auf Photonics West 2014
Dreieinhalb Jahre lang haben fünf Forschungseinrichtungen und zwei Industrieunternehmen im Rahmen des Europäischen Verbundforschungsprojektes »TACO« an der Entwicklung eines neuartigen 3D-Kamerasystems gearbeitet, das Roboter befähigen soll, anspruchsvollere Aufgaben zu übernehmen. Das Fraunhofer-Institut für Photonische Mikrosysteme IPMS in Dresden steuerte dabei eine neuartige MEMS-Scantechnologie als Hardware-Schlüsselkomponente bei. Diese macht es möglich, ähnlich dem menschlichen Sehen »relevante« Objekte in der Umgebung mit höherer Auflösung zu erfassen, ohne dadurch die Datenmenge erhöhen zu müssen. Auf der Photonics West in San Francisco vom vierten bis sechsten Februar 2014 stellt das Fraunhofer IPMS das komplette Kamerasystem erstmalig als funktionsfähigen Prototyp der breiten Fachöffentlichkeit vor.
Farben und Helligkeiten zu unterscheiden, Entfernungen einzuschätzen, Gegenstände und Bewegungen in unserer Umgebung sekundenschnell dreidimensional zu erkennen. Was Dank unserer Augen und unseres Gehirns für uns Menschen ein Leichtes ist, bedeutet für Maschinen eine große Herausforderung. Weil es Robotern beim künstlichen dreidimensionalen Sehen entweder an in Echtzeit aufgelösten räumlichen Informationen oder der notwendigen Schärfe mangelt oder die Fülle der erfassten Bildinformationen zu groß ist, um schnell genug verarbeitet und in Handlungen umgesetzt werden zu können, ist es bislang nur in Ansätzen gelungen, Roboter zu entwickeln, die Serviceaufgaben wie zum Beispiel Reinigung, Bau, Wartung, Sicherheit oder persönlicher Betreuung übernehmen könnten. Das muss jedoch nicht so bleiben, finden Forscher des Fraunhofer-Instituts für Photonische Mikrosysteme IPMS in Dresden. Die Wissenschaftler haben eine auf Fertigungsmethoden der Mikrosystemtechnik aufbauende extrem kompakte Scantechnologie (»LinScan«) für ToF (time of flight)-Entfernungsmesssysteme entwickelt, die eine dreidimensionale Bildaufnahme mit flexibler Abtastgeschwindigkeit und somit ein Scannen mit angepasster Auflösung ermöglicht. Mit LinScan ausgestattete 3D-Kamerasysteme könnten Roboter zukünftiger Generationen dazu befähigen, ihr Umfeld nach im Sichtfeld auftauchenden Objekten grob abzusuchen und lediglich die gesuchten Objekte mit größerer Genauigkeit aufzulösen. Der Roboter hätte es mit vergleichsweise geringen Datenmengen zu tun und wäre dennoch in der Lage, ein besseres Verständnis seiner Umgebung zu gewinnen, um mit alltäglichen Objekten und unserer Umwelt interagieren zu können.
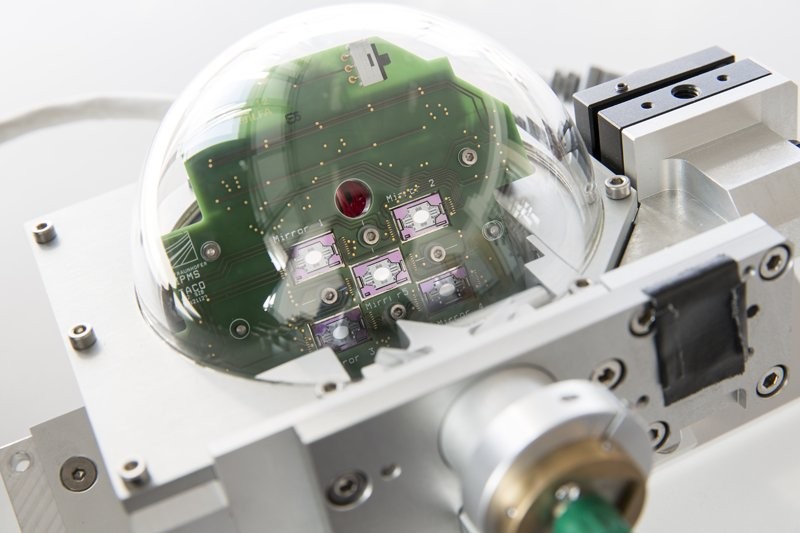
Voraussetzung für eine Umsetzung dieses so genannten Prinzips der Foveation ist allerdings, dass der Roboter weiß, wonach er suchen soll, und dass er auch in der Lage ist, die gesuchten Objekte sekundenschnell zu erkennen und zu interpretieren. Neben der Hardware (Auge) benötigt er dazu entsprechende Bildanalyse-Software-Algorithmen (Gehirn). Außerdem sollte der Roboter auch mit Bildsensoren und -Software für dreidimensionales Sehen ausgestattet sein, um ein räumliches Verständnis seiner Umwelt zu gewinnen und so Objekte präzise ansteuern zu können. Um all diesen Anforderungen gerecht zu werden, arbeitete das Fraunhofer IPMS im Rahmen des Europäischen Verbundforschungsprojektes »TACO« – Three dimensional Adaptive Camera with Object Detection and Foveation mit vier weiteren Forschungseinrichtungen und zwei Industrieunternehmen gemeinsam an der Entwicklung eines neuartigen adaptiven 3D-Kamerasystems. Herzstück des Systems ist ein optischer Scankopf mit fünf synchron betriebenen LinScan-Spiegeln des Fraunhofer IPMS. Das MEMS-Scannerarray gewährleistet die erforderliche Empfangsapertur des Time of Flight (TOF)-Entfernungsmesssystems von effektiv 5 mm und wurde für ein adaptives 3D-Kamerasystem mit mindestens 40° x 60° optischem Scanbereich, 1 MVoxel/s Messrate des TOF-Entfernungsmesssystems und 3 mm Messunsicherheit bei 7,5 m Messentfernung ausgelegt. Der quasistatische Antrieb der Mikroscanner ermöglicht einen zeilenweisen Bildaufbau mit variabler Bildwiederholrate von <1 - 100 Hz, wobei im relevanten Bildbereich die vertikale Messpunktdichte durch Verringerung der Scangeschwindigkeit lokal erhöht werden kann. Die horizontale Bildaufnahme mittels des kardanisch gelagerten 1,6 kHz resonanten Mikrospiegels gewährleistet im Vergleich zu einem 2D-quasistatischen Antrieb eine größere Empfangsapertur und somit höhere Auflösung der TOF-Entfernungsmessung bei gleichzeitig großem optischen Scanwinkel von bis zu 80°.
Das TACO-Projekt wurde kürzlich mit der Entwicklung eines voll funktionsfähigen Komplettsystems abgeschlossen. Dieser Prototyp wird am Messestand des Fraunhofer IPMS Nummer 4407 auf der Fachmesse Photonics West in San Francisco vom vierten bis sechsten Februar 2014 erstmals dem Fachpublikum vorgestellt. MEMS-Scantechnologien des Fraunhofer IPMS sind außerdem Gegenstand eines Fachvortrags im Rahmen der parallel stattfindenden Fachkonferenz 8977. Chefentwickler Dr. Thilo Sandner spricht zum Thema »Micro-scanning mirrors for high-power laser applications«.
Über TACO
TACO (Three-dimensional Adaptive Camera with Object detection and foveation) ist ein im Rahmen des 7. Rahmenprogramms durch die Europäische Union co-finanziertes Forschungsprojekt. Das Projekt startete im ersten Quartal 2010 unter der Führung der Technikon Forschungsgesellschaft mbH, mit einer Laufzeit von 36 Monaten.
Die Projektpartner im TACO-Projekt: Technikon Forschungs- und Planungsgesellschaft mbH (AT), Shadow Robot Company Limited (UK), Oxford Technologies LTD (UK), TU Wien (A), Fraunhofer-Gesellschaft (DE), Stiftelsen SINTEF (N), und die CTR Carinthian Tech Research AG (AT).